ESUM – Analysing trade-offs between the energy and social performance of urban morphologies
Urban planning decisions usually have long-term implications that affect both the energy performance, as well as people’s experience and the appearance of a city. Once a city or urban quarter is built and problems in these areas start to arise, improvements can often only relieve the symptoms, and rarely address the roots. It is therefore important to address these issues appropriately and early in the planning process. Today’s urban design goals often put energy efficiency in the foreground. But energy performance considerations alone do not make livable and sustainable urban environments. In addition to the ecological dimension, a sustainable design must likewise consider the social dimension. However, this is often difficult to operationalize, especially in the planning phase, and is consequently not always sufficiently taken into account. In this context, an unsolved problem for sustainable urban planning is to interpret urban structures in terms of their social implications and to systematically evaluate urban design proposals in terms of their social and energy performance related aspects.
In this project, we investigated the relationships between energy performance aspects of urban structures and the perception of a city by its inhabitants. In the first step, our project was focused on the assessment of social and energy performance data of exemplary urban structures in Zurich and Weimar. To this end, we developed methods to firstly measure the emotional impact of spatial structures quantitatively based on empirical studies and secondly to extend the existing computer-based analytical methods to new aspects. For the energy analysis, we drew on existing methods. In the second step, we compared urban structures according to social and energy-related aspects by correlating the empirical data with the results of computer-based analyses. Based on the results of this comparison it was possible to interpret the calculated measures for urban structures in terms of social aspects such as user behavior and perception. In the third step, we drew on this to develop methods to find the best compromise solutions that fulfill social and energy performance aspects equally well. In our study, we focused on two central fields of action in urban planning: the definition of street networks and the distribution of building masses, which were collectively referred to as urban morphology.
The results of this project make it possible, using computer-based analysis methods and simple design models, to forecast the social and energy performance implications of planning decisions, and to develop compromises for both dimensions. These planning aspects are crucial to ensure sustainable urban planning as urbanization increases.
Contact:
Dr. Varun K. Ojha | ojha@arch.ethz.ch | +41 (0) 44 633 70 47
The project is funded from 2014 – 2017
Homepage:
http://esum.arch.ethz.ch/
Presentations and Workshops:
ESUM: data analysis 22-Feb-2017
MAPS: ESUM pattern recognition 12-Jul-2017
Human Perception: ESUM pattern recognition 14-Jul-2017
Breaking The Wall 29-09-2017
ESUM+: People’s commuting experience 18-Apr-2018
ETH-AIT Workshop 06-06-2016
Funded by:

and

Project partners:
 ETH Zurich
ETH Zurich
and
 Bauhaus-University Weimar
Bauhaus-University Weimar
Data analysis for understanding the impact of urban design on social performance of a city (ADvISE)
Urban planning decisions greatly affect the life in cities in many perspectives: the transportation network and the appearance are straightforward examples, but implications of the planning go deeper into citizens’ experience. The outcomes of certain design decisions are not well-studied due to the complexity of the problem. Therefore, when working on urban planning projects it is common to decompose the problem into multiple aspects that their influence is known to some extent. Planners typically draw on past experience when subjectively prioritizing which aspects to consider with which degree of importance for their planning concepts. This practice, although understandable, places power and authority in the hands of people who have varying degrees of expertise, which can mean that the best possible solution is not found, because it is either not sought or the problem is regarded as being too complex for human capabilities. To improve this situation, the project presented here intends to aggregate the designers’ past experience using data analysis techniques and optimization algorithms to develop a planning support system that can help to find the best compromises for urban design problems. We aimed to produce an open framework with basic functionality to efficiently search for compromise solutions for complex planning problems and an experimental software prototype with an intuitive user interface for representing planning problems and presenting optimal solutions at various stages of the design process. The potential of the framework was assessed by means of real cases. The approach we proposed contributes to making urban planning more evidence‐based.
Software prototype: https://qua-kit.ethz.ch/
Contact:
Artem Chirkin | chirkin@arch.ethz.ch | +41 (0)44 633 79 62
Dr. Reinhard König | reinhard.koenig@arch.ethz.ch | +41 (0)44 633 72 10
The project is funded for 2016 – 2018
Funded by:
& 
Project partners:



Dafna Fisher-Gewirtzman
Density: As we perceive it
Monday, 6th Oct. at 18:00
HIT F 22 (ETH campus Hönggerberg)
Topic:
Cities densification is a fact. The question is how to increase the physical density while maintaining quality of life with low perceived density? Density measurements
do not represent the perceived density, as various urban morphologies in similar density result in varied perceived density.
In her talk, Dafna will present her research of 3D visual analysis models, integrating quantitative and qualitative information. These models aspire to represent the
human perception of space and to be used as tools supporting design for smarter sustainable built environment of our future dense cities.
CV:
Dafna Fisher-Gewirtzman is an assistant Professor at the Faculty of Architecture & Town Planning at the Technion-Israel Institute of Technology. She is the Academic Director of the Visualization Laboratory.
Her research focus is in the field of Visual analysis and simulation of urban and architectural space aiming at a sustainable built environments. In addition, she is researching the design processes of adaptive reuse of existing buildings. Her research is financially supported by the Israeli Scientific Foundation (ISF). She was the recipient for the UNESCO fellowship.
Her research work is published in leading professional Journals, such as Environment and Planning B, Urban Design International, Journal of Architectural and Planning Research, Int. AR (Interior Architecture), Survey Review. These days she serves as guest editor of a special issue for CEUS. She presented her research in many international conferences in Europe and North America. And was an invited speaker to several conferences and universities.
Dafna enjoy teaching a lot and is extensively involved in architecture design courses. Her teaching focuses on adaptive reuse of existing buildings and interior architecture. Since she initiated the Visualization Laboratory at the faculty of Architecture at the Technion she integrated the 3D immersion (in virtual reality) capabilities in the design studio. In recognition of her excellence in academic teaching, she became a laureate of the prestigious Yanai prize in 2013.
In addition to her academic activities occasionally she practices Architecture and Interior Design and her work was published in local professional journals.
Depthmap it a Software developed at UCL for spatial analysis. You can download the program here: https://github.com/varoudis/depthmapX/wiki/Download-and-Install
The examples in the course are made with depthmapX 0.26b, which you can download directly here. Please save the zip file to your hard disk and unzip it. You find a folder for Mac and Windows.
A good tutorial to start with is “Introduction to UCL Depthmap 10” by Joao Pinelo and Alasdair Turner. Or you may have a look at the “DepthmapManual14a” by Akkelies van Nes, Chunyan Song, Abdelbaseer A. Mohamed.
A helpful glossyry for the Space Syntax terms by Björn Klarqvist can be found here.
BasicPlans : Floorplan and WeimarCity.
BasicPlans2: Include the campus BUW example.
ZurichMap: Example Street Network.
You can download depthmaX also via the official UCL website and register there for free: http://www.spacesyntax.net/software/ .
After registration you can download the Depthmap package with a Mac and Windows version in the release folder.
If the software doesn’t work on your computer (propably on mac) you need to install the Qt Libraries (4.8.X) for the OS you are using. Please find the files in the link below:
http://lab.space.bartlett.ucl.ac.uk/files/first_time_depthmapX_users/ (thanks a lot to Tasos Varoudis for this information!).
You can add your own calculations in depthmap using SalaScript. Here you find the tutorial: http://www.bartlett.ucl.ac.uk/graduate/research/space/research/ucl-depthmap/documents/salascript.pdf
Computational Planning Synthesis (CPS)
Emerging technologies for future urban planning
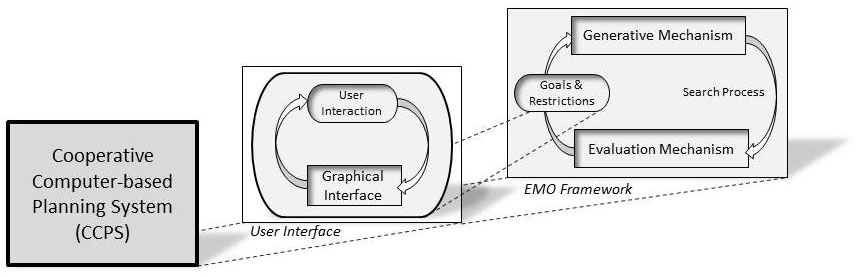
When working on urban planning projects there are usually multiple aspects to consider. Often these aspects are contradictory and it is not possible to choose one over the other; instead, they each need to be fulfilled as well as possible. Planners typically draw on past experience when subjectively prioritising which aspects to consider with which degree of importance for their planning concepts. This practice, although understandable, places power and authority in the hands of people who have varying degrees of expertise, which can mean that the best possible solution is not found, because it is either not sought or the problem is regarded as being too complex for human capabilities. To improve this situation, the project presented here intended to utilise multi-criteria optimisation algorithms to develop a cooperative computer-based planning system (CCPS) that can help to find the best compromises for complex problems (figure 1).
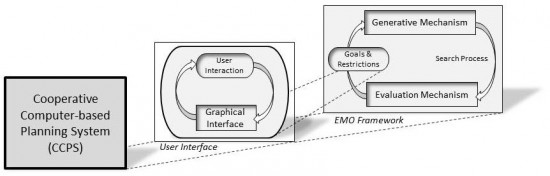
Figure 1: Koenig, R. (2013) Schematic design of the most important components of a CCPS
The first challenge in utilising multi-criteria optimisation algorithms for planning is formulating the problem: The planner’s often vague qualitative requirements need to be translated into a precisely quantifiable problem representation that can then be used in an optimisation algorithm. This difficulty of translation is one reason why planners do not utilise computers in this stage. This refusal, however, hinders the systematic evaluation of possible constellations of compromises between contradictory planning requirements. In addition, many examples of the use of optimisation methods for planning support are restricted to a single goal. The situation is further complicated by the fact that there are a mixture of contradicting and non-contradicting criteria as well as of directly measurable criteria and only indirectly interpretable measures.
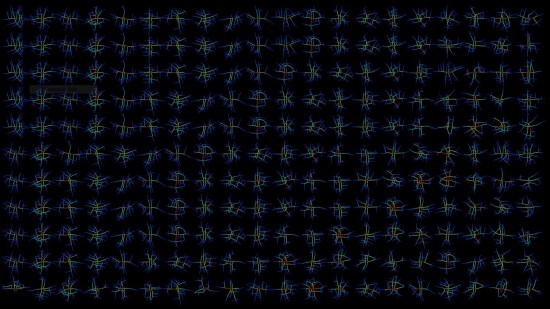
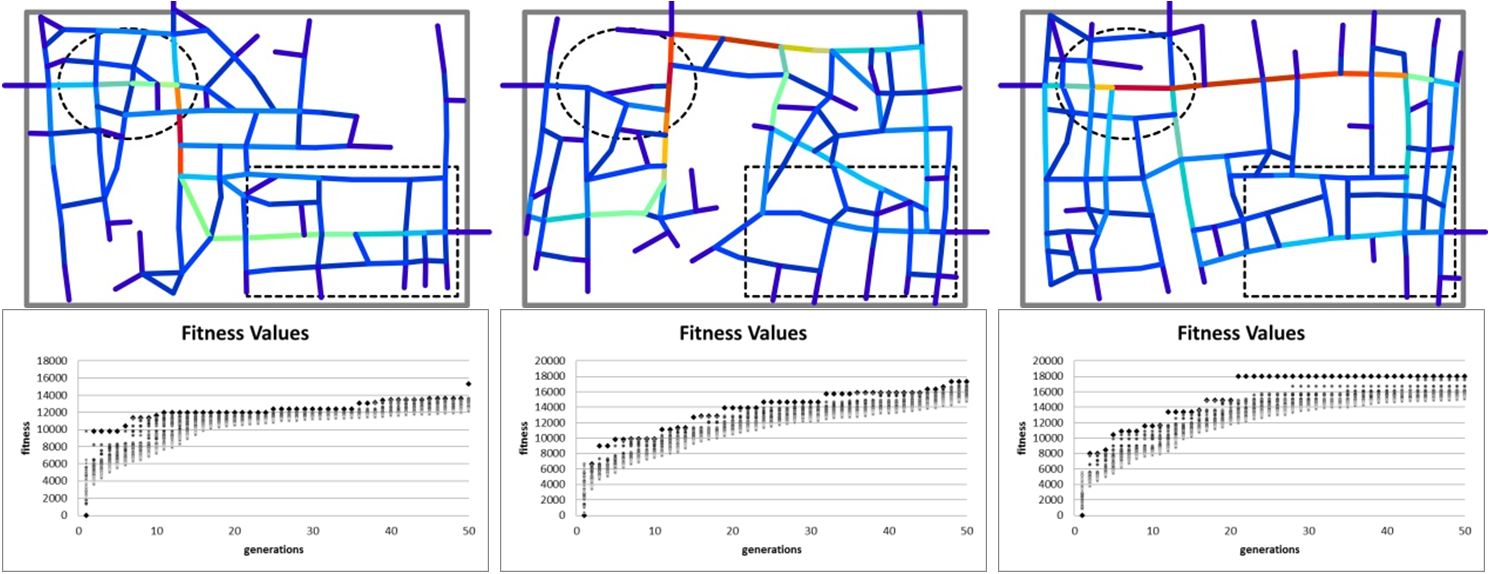
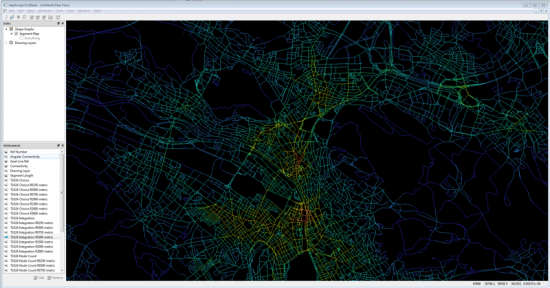
Figure 2: Koenig, R. (2013) Evolutionary generated street networks.
To address the issue above, the main task of the proposed project was to develop a framework for combining various optimisation techniques. This makes it possible to integrate various problem formulations flexibly and to deal with a mixture of contradicting or non-contradicting goal functions. As a basis for this framework we used state-of-the-art evolutionary algorithms (EA) (Figure 2) and evolutionary multi-criterion optimisation (EMO) methods. The main argument for using EMO is its flexibility with regard to the problem representation, which was crucial for this project given the nature of the problems described above (examples are shown Figures 3 to 6). Nevertheless, the framework needs to be open to incorporate other individual algorithms that can efficiently optimise specific sub-problems. Our first area of focus was, therefore, the integration of various optimisation techniques and approaches to representing planning problems. From the user perspective we reversed the logic of generative planning systems: rather than exploring the results of different parameter settings or procedural rules, we allow a planner to define what performance a solution should have and the EMO framework then automatically generates a set of best compromise solutions. The task of deducing a solution from its desired properties is called an inverse problem.
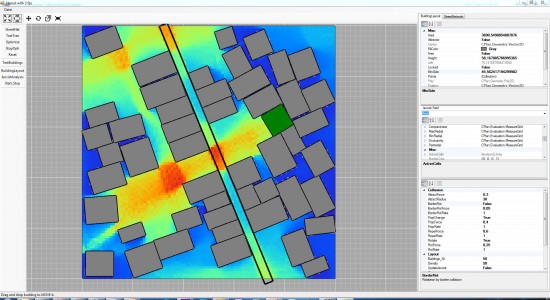
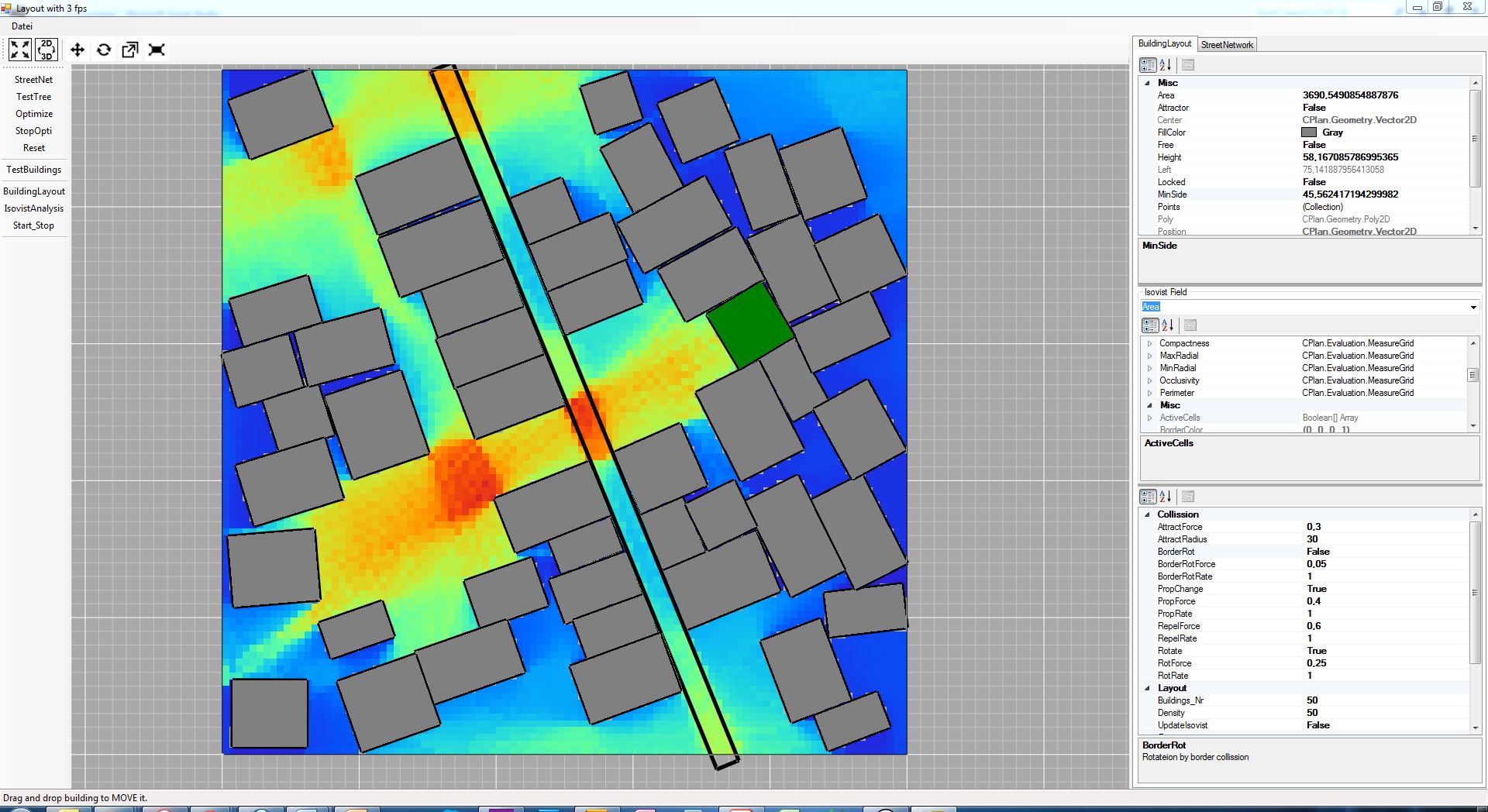
Figure 3: Koenig, R. (2013): Software-prototype for a building layout system. The building-layout can be optimized for certain isovist properties.
Our second area of focus was on the representation of Pareto-optimal solution sets (best compromises) for many contradicting and non-contradicting criteria. This representation also needed to be incorporated into a basic graphic user interface concept, which needed to encompass a way of intuitively defining problem situations, restrictions and the main planning parameters. The optimisation framework was developed using a test scenarios that comprise optimisation strategies for street networks, land parcelling and building volumes. The interdependencies of requirements at these different planning levels was studied in detail. To implement the scenario we used primarily existing methods to generate and evaluate spatial configurations.
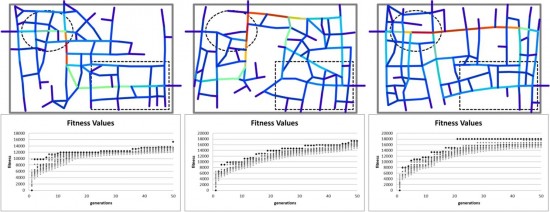
Figure 4: Koenig, R. (2013) Street network optimized for two contradicting criteria by using a weighted sum fitness function.
We aimed to produce an open framework with basic functionality to efficiently search for compromise solutions for complex planning problems and an experimental software prototype with an intuitive user interface for representing planning problems and presenting various compromise solutions. The potential of the framework was assessed using a test scenario. The approach we proposed contributes to making urban planning more evidence-based.
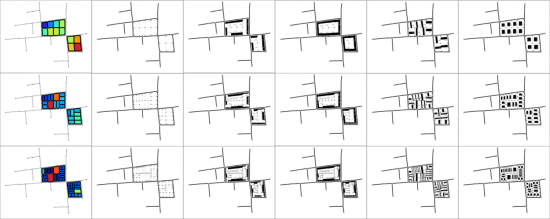
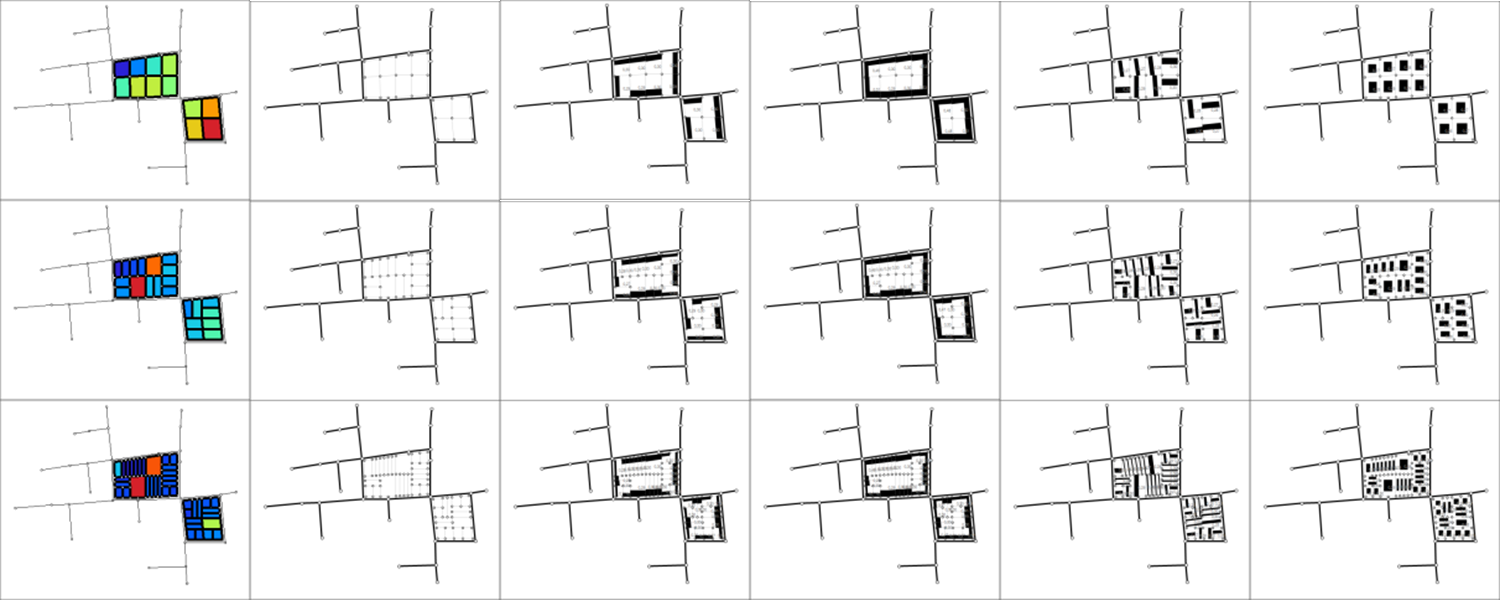
Figure 5: Example for the generation of urban patterns. Figure from Knecht and Koenig (2012).
“Yes, that’s what you want:
A villa in the countryside with a large terrace,
Out front is the seaside, out back the street,
with a beautiful view, cosy and elegant,
from the bathroom you can see the mountains –
but it’s just a short walk to the cinema.
The whole thing is simple and modest:
Nine rooms – no, maybe ten!
A roofgarden, with oak trees …
… a library and all around
solitude and the buzzing of bees.”
Kurt Tucholsky: The Ideal
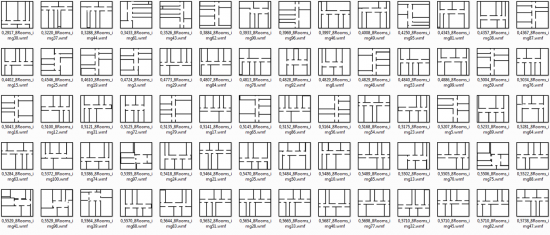
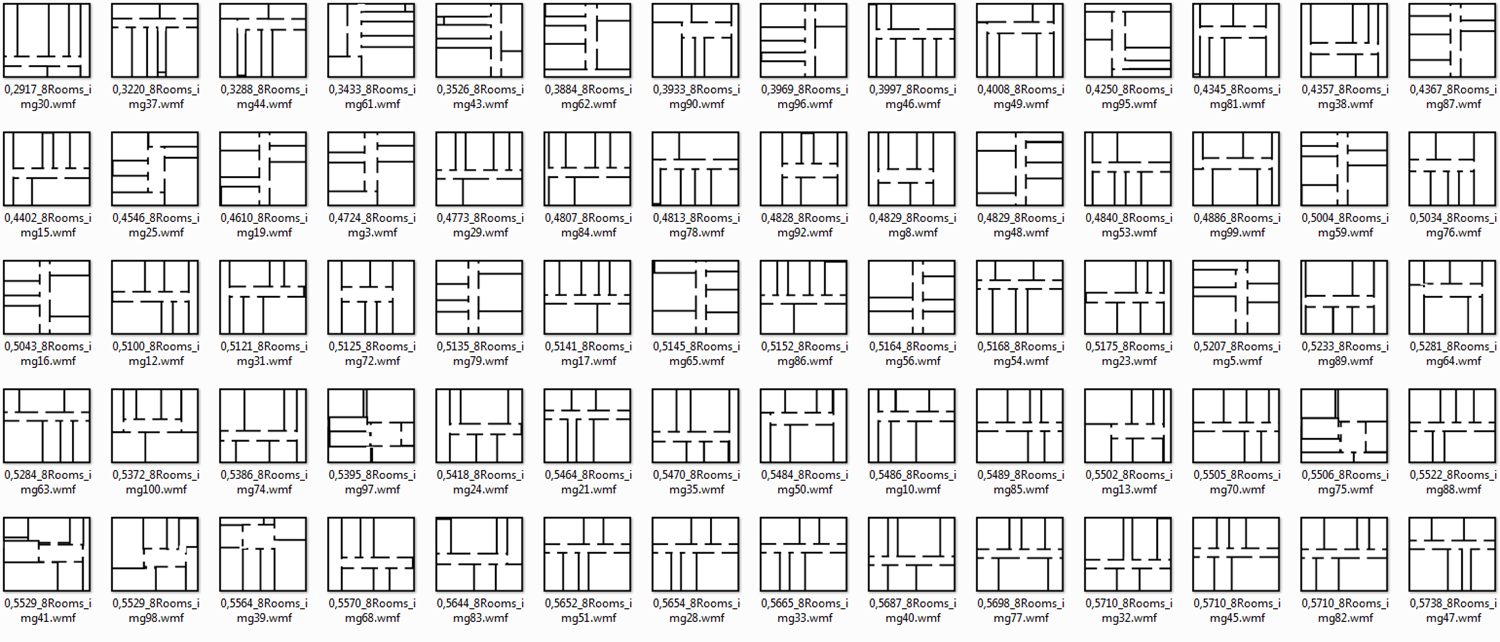
Figure 6: Evolutionary generated floorplans. Figrue from Koenig (2011).
Generative Models in Cognitive Design Computing
Modern cities exhibit growing complexities and dynamics where traditional urban design methods, which still rely on static and sectorial approaches, reach their limits for fast adaptation. At the same time, with the advent of big data and the improvement of our abilities to process large amounts of data as well as advances in artificial intelligence such as cognitive computing, new opportunities emerge for future-oriented computational design. The integration of cognitive computing in computational design assistance systems could revolutionize the urban design and planning process by allowing to model urban complexities and changing urban dynamics and thus helping to address and respond to these challenges in the urban design and planning processes.
A framework for this approach called “Cognitive Design Computing” has been proposed by Koenig and Schmitt (2016). The framework rests on four pillars: data analysis, user interaction and learning, geometry synthesis, and evolutionary multi-criterion optimization (EMO).The main idea of the method is that the designer can define certain restrictions and the corresponding spatial configurations are generated automatically. To allow a systematic design space exploration, the designer needs to interact with the generative procedure by changing the design framework as well as manipulating the initial geometric elements that are used as the starting point for the urban synthesis process.
Case study in Cape Town – Empowershack Project
Our methods have been applied and tested in the EmpowerShack project case study. An important aim of the project was to develop a layout of streets and plots based on the design framework developed by the Urban-Think Tank team (http://u-tt.com/). The design framework guides the development of a set of customizable functions, which limit the maximum width and length of a plot to ensure that a predefined house type can be placed on the plot. The case study scenario for the EmpowerShack project includes the investigation of a larger urban area, in particular, the informal settlements in Enkanini in Cape Town. From the Cape Town case study, it has been proved that our methods can efficiently and effectively assist the urban planning process taking into account urban designers’ needs. Planners can benefit from the interactive fast prototyping which saves a lot of manual work and improves the planning efficiency.
Videos:
The videos in this gallery are related to one of the main mechanism of CPS (generation, evaluation or optimization).
Publications:
- Koenig, R., Miao, Y., Buš, P., Knecht, K., Chang, M.C. (2017). Interactive Urban Synthesis: Computational Methods for fast Prototyping of Design Proposals, CAAD Futures 2017.
- Miao, Yufan, Koenig, Reinhard, Buš, Peter, Chang, Mei-Chih, Chirkin, Artem and Treyer, Lukas,(2017). Empowering Urban Design Prototyping – A Case Study in Cape Town with Interactive Computational Synthesis Methods in P. Janssen, P. Loh, A. Raonic, M. A. Schnabel (eds.), Protocols, Flows, and Glitches – Proceedings of the 22nd CAADRIA Conference, Xi’an Jiaotong-Liverpool University, Suzhou, China, 5-8 April 2017, pp. 407-416.
- Koenig, R. (2015). CPlan: An Open Source Library for Computational Analysis and Synthesis. In B. Martens, G. Wurzer, G. T, W. E. Lorenz, & R. Schaffranek (Eds.), Real Time – Proceedings of the 33rd eCAADe Conference (Vol. 1, pp. 245–250). Vienna: Vienna University of Technology.
- Koenig, R., Standfest, M., & Schmitt, G. (2014). Evolutionary multi-criteria optimization for building layout planning: Exemplary application based on the PSSA framework. In E. M. Thompson (Ed.), Proceedings of the 32nd eCAADe Conference – Volume 2 (pp. 567–574). Newcastle upon Tyne; UK. doi:10.13140/2.1.4951.4888
- Koenig, R., Treyer, L., & Schmitt, G. (2013). Graphical smalltalk with my optimization system for urban planning tasks. In R. Stouffs & S. Sariyildiz (Eds.), Proceedings of the 31st eCAADe Conference – Volume 2 (pp. 195–203). Delft, Netherlands.
- Koenig, R., & Schneider, S. (2012). Hierarchical structuring of layout problems in an interactive evolutionary layout system. AIEDAM: Artificial Intelligence for Engineering Design, Analysis and Manufacturing, 26(2), 129-142.
- Knecht, K., & Koenig R. (2012). Automatische Grundstücksumlegung mithilfe von Unterteilungsalgorithmen und typenbasierte Generierung von Stadtstrukturen. (Donath, D., Koenig, R., Ed.). Arbeitspapiere Informatik in der Architektur. http://infar.architektur.uni-weimar.de/service/drupal-infar/Arbeitspapier15
- Koenig, R. (2011). Generierung von Grundriss-Layouts mittels hybrider Evolutions-Strategie. Weimar: Bauhaus-Universität Weimar.
http://infar.architektur.uni-weimar.de/service/drupal-infar/AP_Grundriss-Layouts
- Koenig, R., & Bauriedel, C. (2004). Computergenerierte Stadtstrukturen. München: Eigenverlag. http://entwurfsforschung.de/stadtebau/stadtstrukturen/
- Koenig, R., & Bauriedel, C. (2009). Generating Settlement Structures: A Method for Urban Planning and Analysis Supported by Cellular Automata Environment and Planning B: Planning and Design, 36(4), 602 – 624.
- Koenig, R., Donath, D., & Petzold, F. (Eds.). (2012). KREMLAS: Entwicklung einer kreativen evolutionären Entwurfsmethode für Layoutprobleme in Architektur und Städtebau. Weimar: Verlag der Bauhaus-Universität Weimar.
- Koenig, R., & Mueller, D. (2011). Cellular-automata-based simulation of the settlement development in Vienna. In A. Salcido (Ed.), Cellular Automata: Simplicity behind Complexity (pp. 23-46). Vienna: INTECH.
- Schneider, S., Koenig, R., & Pohle, R. (2011). Who cares about right angles? Overcoming barriers in creating rectangularity in layout structures. Paper presented at the eCAADe 2011: Respecting Fragile Places, Ljubljana, Slovenia.
Contact:
Dr. Reinhard König | reinhard.koenig@arch.ethz.ch | +41 (0)44 633 72 10